Substation Robot Application
An important question related to the reliable and efficient supply of electricity is the prevention of failure of substation assets such as transformers and breakers. With performance of substation assets being of great importance, an outstanding research question is whether these assets can be effectively inspected online 24/7 by a mobile autonomous substation robotic technology to prevent unscheduled outages and unexpected failure.
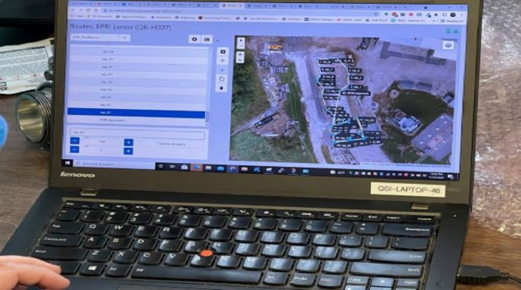
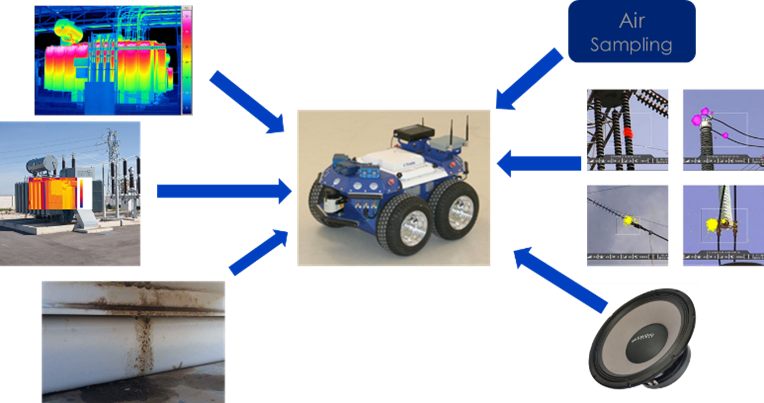
In the first phase of this project, EPRI plans to research and evaluate commercially available mobile autonomous robotic platforms in the market today that are capable of performing 24/7 inspection in an outdoor and unmanned substation environment. The commercial platform should have a self-charging battery technology and an autonomous navigation. The platform will be evaluated in the 138 kV substation yard on EPRI’s Lenox, MA, premises (the “Lenox Lab”). Once a satisfactory platform is obtained, the second step is to equip the robotic platform with sensors defined by the EPRI research team. Under this project, EPRI intends to develop a sensor package relevant for substation asset inspection and to integrate these sensors to the commercial platform. A demo unit will be built and tested out at the Lenox Lab.


Project Overview
Research objectives and focus
Background and Objective • New Learnings • Project duration

Updates & Events
Info for members about events, updates, and results
Project Approach • Deliverables • Calendar of Events